Automating Monolith Migration for Resource-Constrained Edge Systems
Automatically transform legacy code into efficient microservices. This approach balances design with hardware limits, ensuring software runs fast on cars and IoT devices.
Join the DZone community and get the full member experience.
Join For FreeWe usually design microservices with a cloud-first mindset. If a container needs more RAM, we scale it up. If latency increases, we add a cache or a load balancer.
But the world is shifting toward Software-Defined Vehicles (SDVs) and edge computing. In these environments, hardware is fixed, and latency can be a matter of life and death (e.g., autonomous braking systems). Migrating a legacy C/C++ monolith to microservices in this context is dangerous. The overhead of containerization (Docker) and inter-process communication (IPC) can easily overwhelm an embedded CPU.
Research from Mission Critical Systems proposes a solution: Automated, Constraint-Aware Decomposition.
Instead of guessing where to split the monolith, we can use a search-and-evaluate loop that balances modularity against resource consumption and latency. Here’s how the pattern works.
The Problem: The "Microservice Tax"
When you split a function call funcA() -> funcB() into two microservices, you introduce overhead:
- Serialization: Data must be marshaled to JSON or Protobuf.
- Transport: Signals travel over HTTP or ZeroMQ instead of the memory stack.
- Base Load: Each new container requires its own OS runtime slice.
In a recent experiment, researchers found that blindly decomposing a C-based application into 49 separate microservices caused storage usage to balloon by 21 GB and latency to spike by 339 ms. For a vehicle, this is unacceptable.
The Solution: Algorithmic Clustering with Feedback Loops
The proposed system doesn't just look at code structure; it deploys the code, measures it, and adjusts the architecture automatically.
Phase 1: The Dependency Trace
First, we need to understand the monolith. We perform static analysis to generate a call graph.
- Input: Source code (C/C++)
- Process: Remove
main()and generic utility functions (logging, math libraries) to reduce noise - Output: A clean dependency map
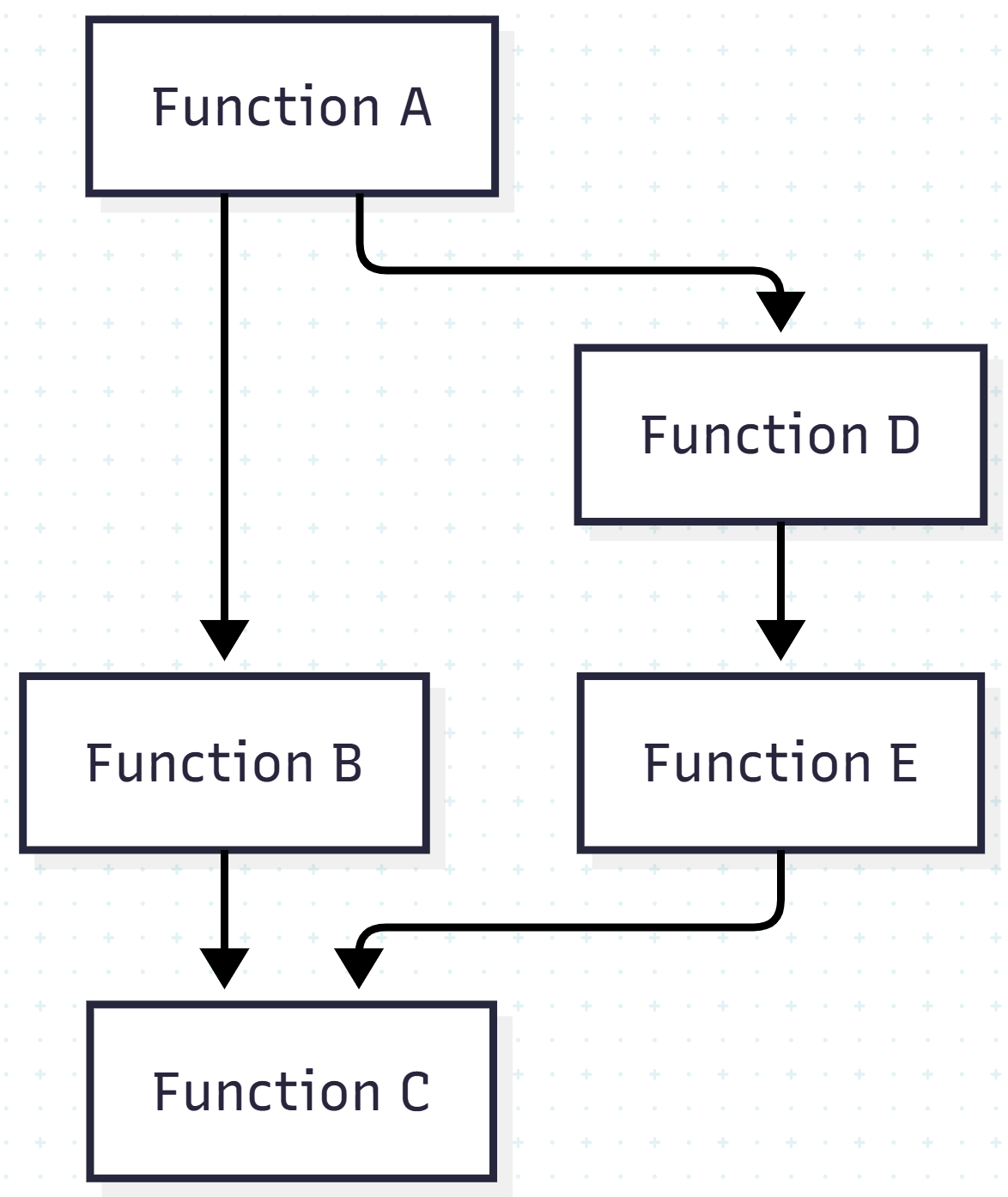
Phase 2: Hierarchical Clustering
Next, we group functions based on distance. In this context, distance is the number of hops between functions in the call graph. Functions that call each other frequently are grouped together to minimize network latency.
This creates a dendrogram (a tree diagram), where we can cut the tree at different levels to create fewer (larger) clusters or many (smaller) clusters.
Phase 3: The Emulation Feedback Loop
This is the innovative part. Most refactoring tools stop at static analysis. This pattern actually compiles and deploys the candidate architecture to a Docker emulator to measure real-world performance.
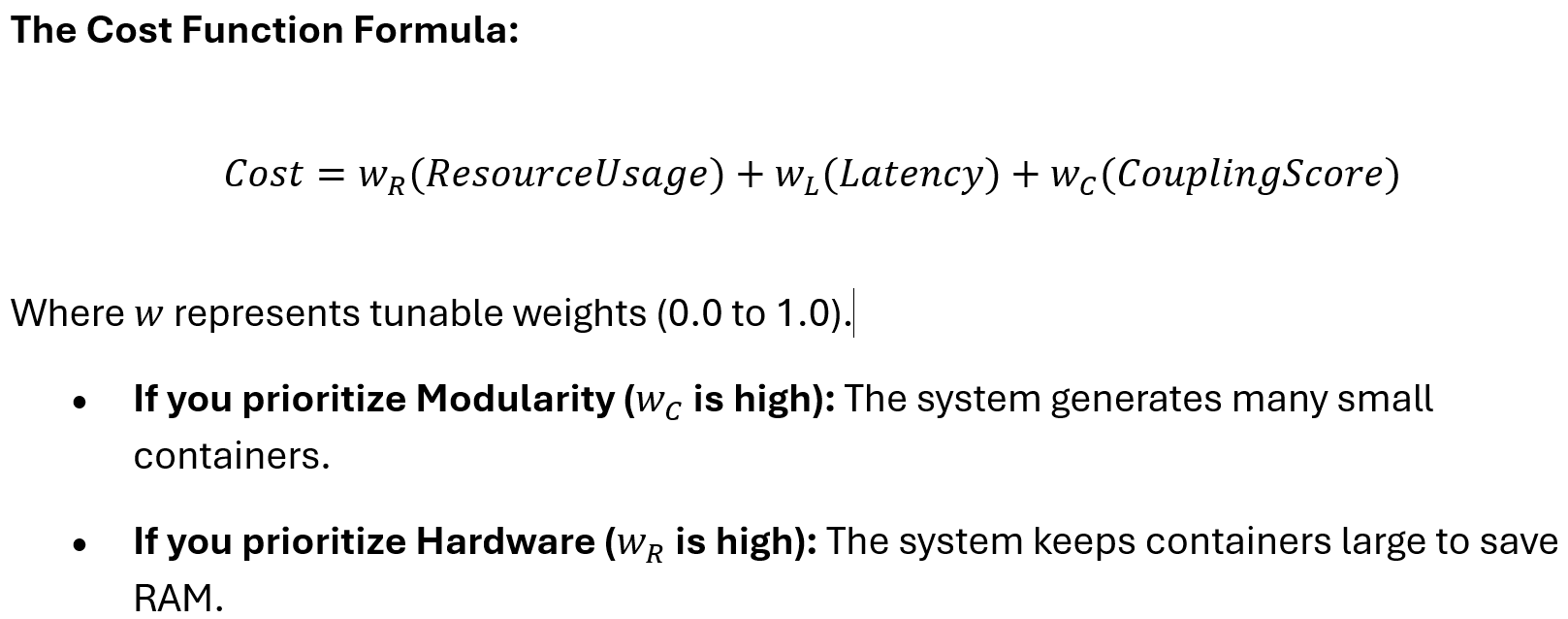
The system uses a search algorithm to find the optimal number of clusters by minimizing a specific cost function.
Implementation: The Auto-Decomposition Pipeline
Here is a Python-like pseudocode representation of the logic used to automate this migration:
def optimize_architecture(source_code, max_latency, max_ram):
# 1. Parse dependencies
call_graph = trace_source(source_code)
# 2. Initial Cluster (Everything in one)
current_clusters = [call_graph]
best_architecture = None
min_cost = float('inf')
# 3. Search Loop (Brute force or Genetic Algorithm)
for n_clusters in range(1, 50):
# Generate candidate architecture
candidates = hierarchical_clustering(current_clusters, n=n_clusters)
# Deploy to Docker Emulator
deploy_to_emulator(candidates)
# Measure Real-world Metrics
cpu, ram = measure_docker_stats()
latency = measure_transaction_time()
independence = calculate_coupling_score()
# Calculate Weighted Cost
cost = (0.5 * ram) + (0.5 * latency) + (0.0 * independence)
if cost < min_cost and latency < max_latency:
min_cost = cost
best_architecture = candidates
return best_architectureCase Study Results: Finding the "Sweet Spot"
The researchers applied this approach to a food delivery application written in C, using Docker Compose for orchestration and ZeroMQ for low-latency messaging.
They tested different weight configurations:
- Balanced Mode: Equal concern for resources and modularity
- Independence Mode: High concern for separating concerns (a microservice-purist approach)
The Result:
- When prioritizing independence
(0, 0, 1.0), the system created 10+ containers, but latency became unacceptable. - When prioritizing resources
(0.5, 0.5, 0), the system identified four containers as the sweet spot.
Resulting Architecture:
- Container 1: Customer and credit card management (high security cohesion)
- Container 2: Input validation (stateless)
- Container 3: Store and menu management
- Container 4: Order processing
This configuration met strict latency requirements for the embedded system while still providing enough separation to allow independent security updates — a key requirement for SDVs.
Conclusion
Migrating to microservices isn’t binary. You don’t have to choose between a monolith and nano-services.
For edge and automotive systems, architecture must be tuned to the hardware. By adopting a metric-driven decomposition strategy — where you deploy, measure, and iterate before finalizing the code structure — you can build systems that are flexible enough for over-the-air (OTA) updates yet efficient enough to run on constrained silicon.
Opinions expressed by DZone contributors are their own.
Comments