Why “End-to-End” AI Will Always Need Deterministic Guardrails
End-to-end AI is probabilistic and prone to hallucinating unsafe physical actions. True safety requires wrapping these models in deterministic guardrails.
Join the DZone community and get the full member experience.
Join For FreeThe "Long Tail" Is Longer Than You Think
Imagine you are driving at night. Your headlights catch a figure ahead. It appears to be a large dog standing on a single wheel, moving at 10 mph.
A human driver immediately processes this as: Ah, it's Halloween! It’s probably a kid in a Halloween dog costume riding their unicycle and going back home after their candy run. The driver then categorizes the “figure” as a human, gives them space, and navigates around them carefully.
A pure end-to-end (E2E) neural network deployed on an autonomous vehicle (AV), however, lacks this semantic luxury. It ingests a stream of raw data, such as image frames, LiDAR points, or similar sensor data, to encounter something that it has likely never encountered in its training set. Is it a dog? But dogs don't have wheels. Is it a vehicle with a pet inside? Pets don’t typically ride in single-wheeled vehicles. Is it a kid on a unicycle? Kids are not typically furry or have tails.
These situations are often termed as “long tail” events. Without the semantic context to resolve this anomaly, an E2E network’s behavior may become undefined. It might choose to stop or swerve. Or, in the worst case, it might confidently decide this is an erroneous, false-positive detection and choose to ignore it entirely.
The AI industry’s obsession with E2E systems is understandable. The idea of feeding raw signals as input into a massive model and outputting a final set of trustworthy decisions can unlock multiple benefits. For one, the architecture sounds very elegant. Secondly, since the architecture is less complex, it scales easily. That works beautifully 99% of the time.
Engineering for safety-critical systems is not about the 99%. It's about understanding the nuance in edge cases. It is about the "Truck full of Stop Signs." If a truck carrying a stack of stop signs merges onto the highway, a pure E2E model might see the pattern "STOP" and slam on the brakes at highway speeds. A human driver, however, understands the context: Stop signs don't move at highway speeds; therefore, these are cargo, not traffic control. A deterministic logical layer implements this missing logic derived from context when the human is not in the loop.
Efforts can be made to continuously optimize such E2E models to safely handle such edge cases. However, by definition, these long tail events are never-ending. They are commonly categorized as unknown-unknowns. Therefore, we need some form of a fundamental deterministic wrapper to impose the laws of physics and logic on the probabilistic output of an AI model. In other words, it is important to establish a "Guardrail" that ensures the system exhibits safe behavior even if the E2E model suggests otherwise.
Why E2E Is a Promise Worth Pursuing
To be fair, traditional modular stacks can have their limitations. The shift to E2E is driven by tangible architectural advantages:
- Architecture: Traditional stacks require complex sub-modules; E2E promises a unified architecture.
- Communication: Traditional stacks need robust and manually defined protocols between modules; E2E systems learn internal representations during training.
- Context: Traditional stacks suffer from "information loss" as data moves down the pipeline; E2E systems retain rich metadata as secondary inputs.
Consider the traditional AV pipeline, which slices responsibility into three major silos:
- Perception: The "eyes." It ingests sensor data to classify objects such as pedestrians, traffic signs, etc
- Planner: The "brain." It processes perception output to calculate a safe trajectory.
- Control: The "hands and feet." It converts the trajectory into steering, throttle, and brake commands.
In this pipeline, Perception might tell the Planner: "There is a pedestrian 50m ahead, defined in the given bounding box, and moving towards us at 3 mph." Unfortunately, in this distillation, valuable nuance is lost. Is the pedestrian looking at their phone? Are they stumbling? Are they making eye contact?
An E2E system can retain rich context to enable desirable behavior. Rather than seeing a bounding box or object list, it processes the subtle nuance of the scene. It might instinctively have the AV slow down for a pedestrian whose posture suggests distraction. This ability to retain nuance is yet another reason an E2E system promises to increase desirable performance.
However, performance is not safety. While the E2E model is excellent at intuition, it lacks guarantees. Therefore, we need a hybrid approach.
The Architectural Solution: The 'Simplex' Pattern
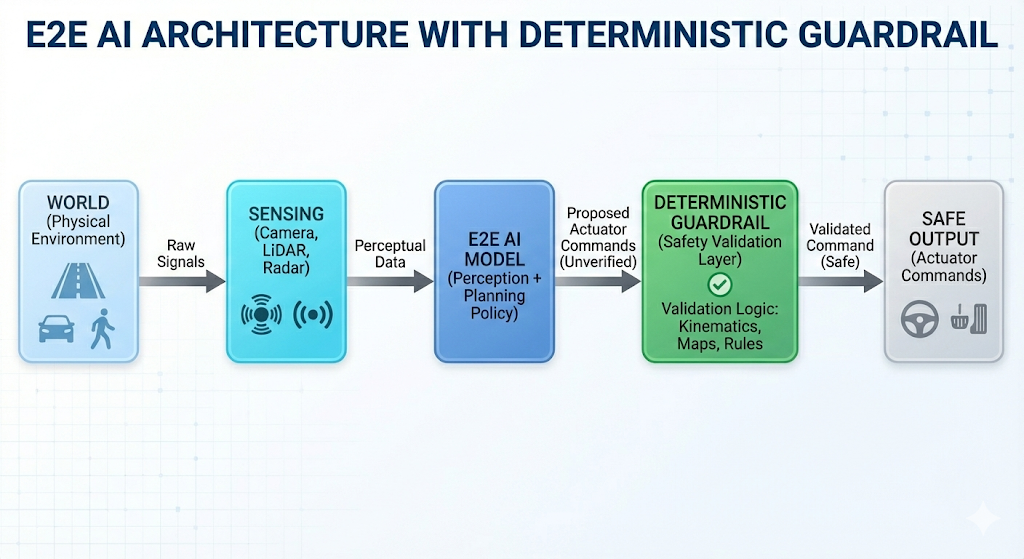
We need to treat the E2E model to enable the end-to-end decision-making process, but stop short of letting it be the sole decision maker. It suggests what to do based on complex pattern matching. However, a separate, deterministic layer must have the final authority to reject unsafe actions.
This creates a hybrid architecture, formally referred to in safety engineering as a simplex architecture. In this architecture, the E2E model would suggest that it sees a clear path and is requesting acceleration to 85 mph. After that, the Validator, which is our Deterministic Guardrail, would evaluate this against safety constraints such as kinematic limits, semantic consistency, or hard geofences. Finally, the Actuator will execute only the commands approved by the deterministic validator.
Guardrail Implementation: A Simple Example
Let's look at what this concept could look like in practice. The following Python script simulates a Trajectory Validator. The core component is the TrajectoryValidator class. It accepts ground-truth data, specifically the legal speed limit from an HD Map and the physical boundaries of the lane.
We then run this validator against three scenarios, with a specific focus on Scenario B: The Vandalized Sign. In this specific edge case, someone has tampered with a '35 mph' speed limit sign to look like an '85 mph' speed limit sign by spray painting on the ‘3.’ The E2E vision model, trusting its optical input, requests an acceleration to 85 mph. However, the validator performs a logic check and determines there are no 85 mph roads in the area. The map further lists the segment as a 35 mph zone. Detecting the discrepancy, the validator overrides the E2E AI’s probabilistic output and limits the AV to drive at a logical and legal speed.
class TrajectoryValidator:
def __init__(self, map_speed_limit, road_boundaries):
self.map_speed_limit = map_speed_limit
self.road_boundaries = road_boundaries # [min_lat, max_lat]
def validate_command(self, E2E_output):
"""
Input: Dictionary containing the E2E_output of 'speed' and 'position'.
Output: Dictionary with the 'final_cmd' and a 'status' note.
"""
final_cmd = E2E_output.copy()
status = "VALID OUTPUT"
# Check 1: Speed Limit Enforcement
# We allow a small buffer (e.g., +5 mph) but limit anything beyond that.
# This handles cases where the AI misreads a sign (e.g., 35 as 85).
hard_limit = self.map_speed_limit + 5
if E2E_output['speed'] > hard_limit:
final_cmd['speed'] = hard_limit
status = "INVALID OUTPUT: EXCEEDS LIMIT. CLAMPING SPEED."
# Check 2: Road Boundary Enforcement
# If the AI proposes driving off-road, we trigger a safety stop.
pos_lat = E2E_output['position_lat']
if not (self.road_boundaries[0] <= pos_lat <= self.road_boundaries[1]):
final_cmd['speed'] = 0
# Pull over to the shoulder
final_cmd['position_lat'] = self.road_boundaries[0]
status = "INVALID OUTPUT: OFF-ROAD DETECTED. INITIATING SAFE STOP."
return final_cmd, status
# --- Scenario Runner ---
def run_scenarios():
# Define our "World": 35 mph zone, Road exists between lat=-5 and lat=5
validator = TrajectoryValidator(map_speed_limit=35, road_boundaries=[-5, 5])
# Case A: Normal Operation
# E2E AI proposes safe speed (30) in middle of lane (lat=1)
output_a = {'speed': 30, 'position_lat': 1}
cmd_a, status_a = validator.validate_command(output_a)
print(f"Scenario A: E2E Output {output_a} -> Validated: {cmd_a} [{status_a}]\n")
# Case B: The "Graffiti" Error
# E2E AI reads a vandalized sign and proposes 85 mph
output_b = {'speed': 85, 'position_lat': 2}
cmd_b, status_b = validator.validate_command(output_b)
print(f"Scenario B: E2E Output {output_b} -> Validated: {cmd_b} [{status_b}]\n")
# Case C: Hallucination
# E2E AI thinks the sidewalk (lat=12) is drivable space
output_c = {'speed': 20, 'position_lat': 12}
cmd_c, status_c = validator.validate_command(output_c)
print(f"Scenario C: E2E Output {output_c} -> Validated: {cmd_c} [{status_c}]\n")
if __name__ == "__main__":
run_scenarios()The Universal Need for Guardrails Around End-to-End AI
This architectural pattern isn't specific to autonomous vehicles. It applies anywhere E2E AI black boxes make high-stakes decisions.
Consider an E2E medical AI model in Radiology. Such a model might analyze raw MRI scans to detect tumors. It is incredibly sensitive and can spot patterns invisible to the human eye. However, it is also prone to "shortcut learning," and perhaps it learned to associate a specific lighting artifact with benign tissue.
- The failure: The AI classifies a reasonably large 5cm tumor as "Benign" with 99% confidence because of a lighting artifact-based training.
- A suitable guardrail: A deterministic rule that enforces that if a tumor with a mass > 3cm is detected, it MUST be flagged for biopsy irrespective of the model’s confidence in it being benign.
The guardrail should not care about the AI's confidence in a limited, yet high-stakes, situation. It should care about hard metrics.
By layering simple rules over a complex E2E AI model, we prevent catastrophic false positives or negatives in the case of the medical AI, autonomous driving AI, or other similar safety-critical systems.
Conclusion: Why Determinism Is Non-Negotiable
The beauty of the code above is its traceability. If the car refuses to drive 85 mph, we don't have to guess. The logs explicitly state 'INVALID OUTPUT: EXCEEDS LIMIT.' We have instant, deterministic root cause analysis. On the other hand, if a pure E2E model decides to drive 85 mph, debugging it involves dissecting millions of weights to understand why it prioritized the "8" loop of the graffiti over the context of the residential street.
We cannot train out every edge case. It will be a long time before we have enough training data for the majority of the "unknown-unkowns." However, by wrapping our probabilistic E2E AI in deterministic guardrails, we allow the AI to be brilliant while ensuring the overall system remains safe.
Opinions expressed by DZone contributors are their own.
Comments